로봇과 행동 챕터에서 이미 지능형 로봇에 알아보았습니다. 인공지능 로봇이나 지능형 로봇이나 단어만 다를 뿐 비슷한 맥락으로 인간이 제공한 정보, 자료, 데이터를 바탕으로 스스로 인지하고 학습하고 추론하여 판단하고 행동합니다.
인공지능 로봇의 기능
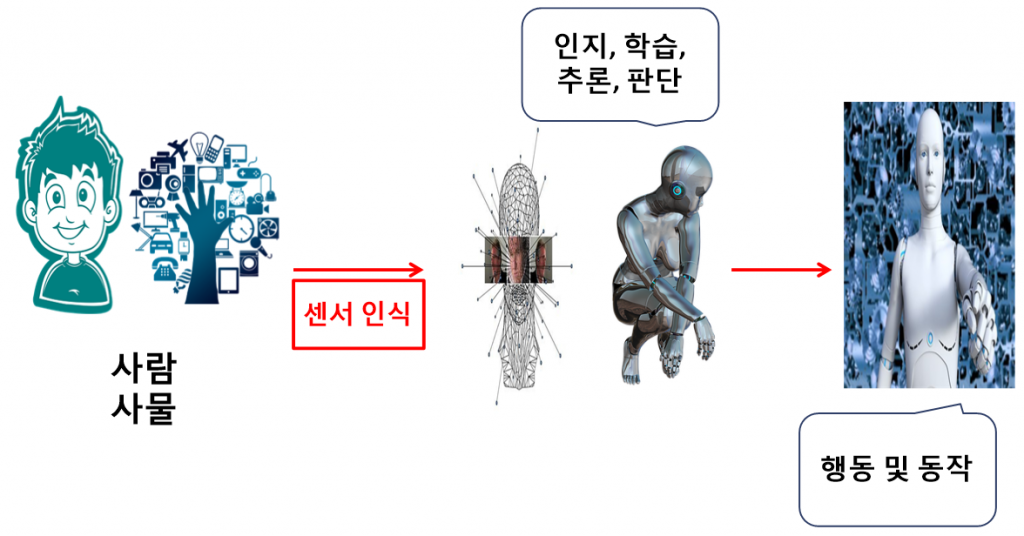
인공지능 로봇은 외부환경을 인식하고 스스로 상황을 판단하여 자율적으로 동작을 해야 하기 때문에 다음과 같은 네 가지 기능을 가집니다.
• 환경 인식 기능
환경 인식 기능은 먼저 학습한 지식과 정보를 바탕으로 사람이나 사물을 보고 종류나, 크기, 방향, 위치 등을 알아내는 것을 의미합니다. 이렇게 시각적인 것뿐만 아니라 주변에서 들리는 사람의 음성과 다양한 소리를 인식하는 것도 환경 인식 기능이라고 할 수 있습니다. 혹시 자동차에서 오토라이트 기능을 알고 있나요? 자동차에 있는 조도 센서가 밝은 날과 어두운 날, 낮과 밤을 구분하여 어두운 상황에서는 자동으로 자동차의 라이트가 작동할 수 있도록 하는 기능입니다. 이 기능도 환경 인식 기능의 대표적인 예라고 할 수 있습니다. 특히 자율주행자동차에서 환경 인식 기능은 안전한 운전을 위해서는 필수적입니다.
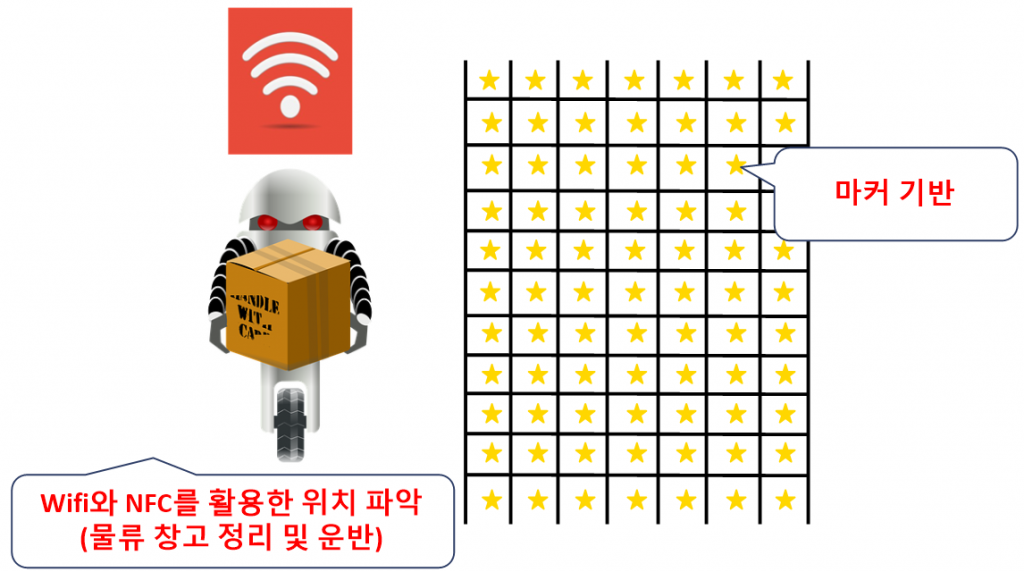
• 위치 인식 기능
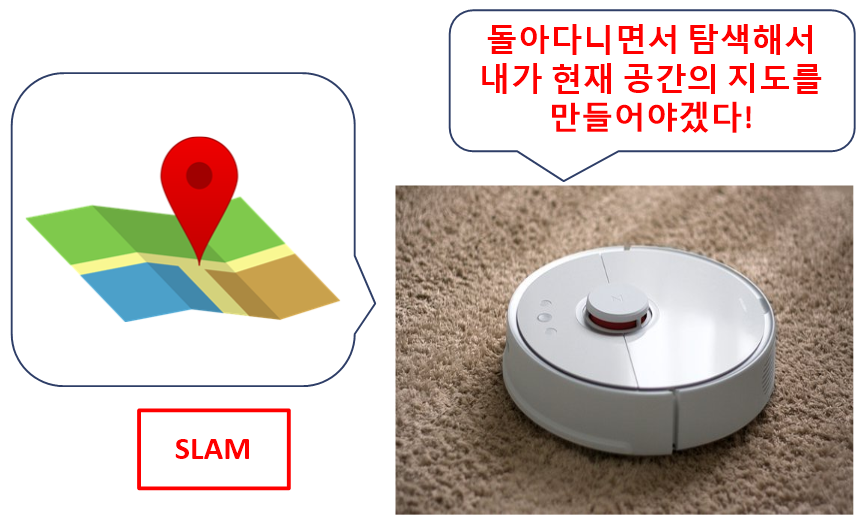
위치 인식 기능은 인공지능 로봇이 스스로 공간지각능력을 갖고 현재 자신의 위치가 어디에 있는지 스스로 인식할 수 있는 기능입니다. 나중에 배울 자율이동 기능 구현에 핵심이 되는 기술로 센서와 마커를 기반으로 한 위치 인식 기술등 다양한 접근 방법이 연구되고 있으나 현재는 마커 기반의 기술이 많이 사용되고 있습니다. 미래의 자율주행자동차의 완벽한 운전을 위해서는 현재 로봇청소기에서 사용하고 있는 SLAM (Simultaneous Localization And Mapping) 기능을 더욱 정교하게 발전시켜야 합니다. SLAM은 동시다발적 지역화와 매핑의 의미로 로봇이 실내에서는 GPS의 정확도가 실외에서보다 떨어지기 때문에 실외에서 안전하게 주행하기 위해서 로봇이 임의의 공간에서 이동하면서 주변을 탐색하고 그 공간의 지도 및 현재 위치를 파악할 수 있습니다.
• 조작 제어 기능
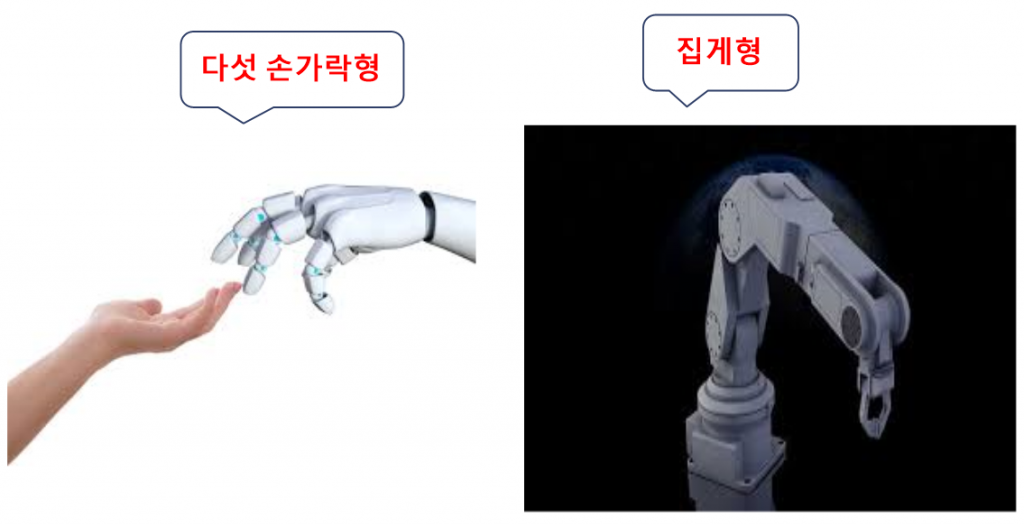
조작 제어 기능은 물건을 잡고 자유롭게 핸들링하는 기술을 의미합니다. 로봇이 단순히 계산만 하는 컴퓨터와 차별화할 수 있는 가장 강력한 기능입니다. 오늘날 가정에서 사용하고 있는 로봇청소기의 경우 흡입할 수 있는 기능만 있지만 조작 제어 기능이 발전한다면 물체를 정리하거나 옷을 개는 등의 활동을 할 수 있을 것입니다. 인간이 다섯 손가락으로 물건을 잡는 것처럼 다섯 손가락 모양의 스마트핸드 기술이 대표적인 조작 제어 기술의 하나입니다.
• 자율 이동 기능
자율이동 기술은 말 그대로 자유롭게 이동할 수 있는 기능을 의미합니다. 앞서 모라벡의 역설과 관련한 이야기를 하면서 이동 메커니즘은 바퀴형, 4족형, 2족형, 수영형, 비행형 등으로 분류할 수 있다고 하였습니다. 바퀴형의 경우 경로 계획과 제어 기술이, 4족형의 경우 밸런싱을 할 수 있는 기술이 핵심기술이라고 할 수 있습니다. 2족형은 인간의 보행형태를 실현하는 기술이지만 모라벡의 역설, 즉 인간에게는 쉬운 것이 로봇에게는 어려울 수 있으므로 인간과 똑같이 걷거나 뛰는 것은 한계가 있습니다. 하지만 과거와 비교하여 현재는 기술이 많이 발전하였고, 진행중입니다.
이미지 출처 : 나무위키
Part 1. 인공지능 로봇과 기능 Quiz
1. 학습한 지식과 정보를 바탕으로 사람이나 사물을 보고 종류나 크기, 방향, 위치 등을 알아내는 것은 위치 인식 기능이다.
Correct!Wrong!
2. 인공지능 로봇이 스스로 공간지각능력을 갖고 현재 자신의 위치가 어디에 있는지 스스로 인식할 수 있는 기능은 환경 인식 기능이다.