
블라인드 탐색은 맹목적 탐색이라고도 하며, 사전 정보를 이용하지 않는다.
Correct!
Wrong!
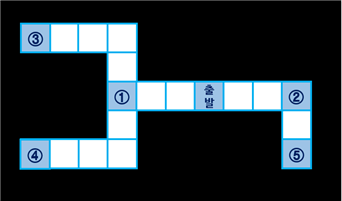
블라인드 탐색은 규칙 없이 탐색하여 시행착오를 겪으면서 문제의 해를 찾는 것이다.
Correct!
Wrong!
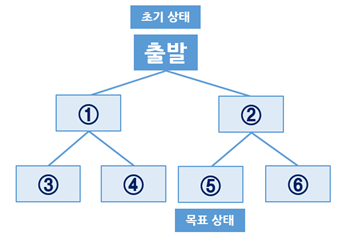
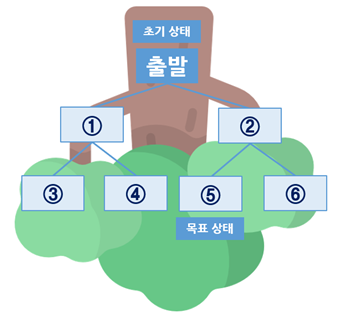
정해진 순서에 따라 탐색하며, 순서에 따라 종류도 다양하다.
블라인드 탐색은 바둑이나 체스 같은 복잡한 게임의 수를 찾기에 적합하다.
Correct!
Wrong!
- 블라인드 탐색은 효율성이 떨어져 실제 문제에 적용하기 어렵다.
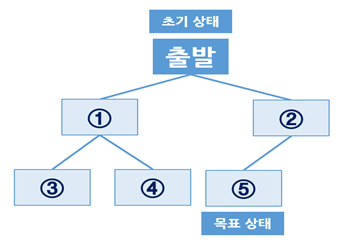
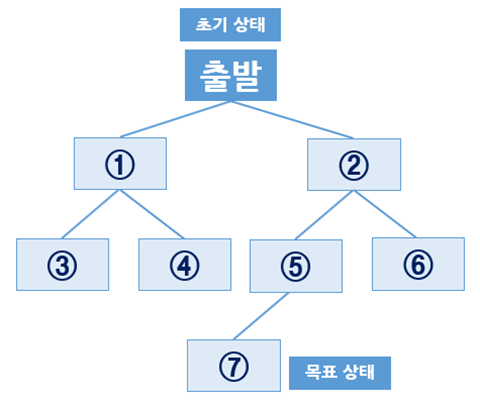
다음 트리를 ‘깊이 우선 탐색’으로 탐색한다면 ❶-❸-❹-❷-❺-❼ 순서로 탐색하는 것이다.(단, 왼쪽부터 탐색한다고 한다.)
Correct!
Wrong!
깊이 우선 탐색은 깊이 방향을 우선으로 탐색하는 것이다.